1.本發(fā)明涉及
垃圾箱技術(shù)領(lǐng)域,尤其涉及
一種智能垃圾箱及其控制方法。
背景技術(shù):2.近年來(lái),各種
智能家居層出不窮,智能
垃圾箱作為智能家居的重要組成部分,占據(jù)一定的市場(chǎng)。智能
垃圾箱的功能有自動(dòng)感應(yīng)開(kāi)蓋、一鍵打包、自動(dòng)換袋、自動(dòng)垃圾分類(lèi)等。目前,市面上最常見(jiàn)的是人體感應(yīng)自動(dòng)開(kāi)蓋的智能垃圾箱,包括揮手感應(yīng)、屈膝感應(yīng)等。用戶(hù)可以與垃圾箱無(wú)任何接觸即可投放垃圾,能夠更好的遠(yuǎn)離細(xì)菌,降低交互感染風(fēng)險(xiǎn)。
3.現(xiàn)有的智能垃圾箱需要用戶(hù)主動(dòng)接近垃圾桶才能扔垃圾,使用不夠方便。
技術(shù)實(shí)現(xiàn)要素:4.本發(fā)明旨在解決現(xiàn)有的智能垃圾箱需要用戶(hù)主動(dòng)接近才能扔投垃圾,導(dǎo)致使用不夠方便的技術(shù)問(wèn)題。
5.本發(fā)明提供
一種智能垃圾箱的
控制方法,包括如下步驟:
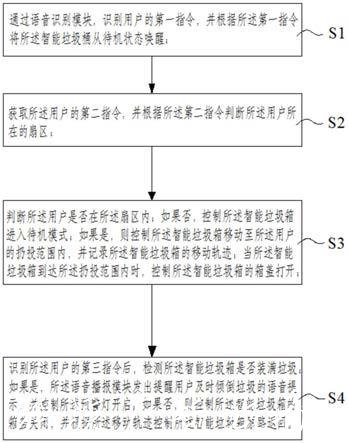
6.s1、通過(guò)語(yǔ)音識(shí)別模塊,識(shí)別用戶(hù)的第一指令,并根據(jù)所述第一指令將所述智能垃圾箱從待機(jī)狀態(tài)喚醒;
7.s2、獲取所述用戶(hù)的第二指令,并根據(jù)所述第二指令判斷所述用戶(hù)所在的扇區(qū);
8.s3、判斷所述用戶(hù)是否在所述扇區(qū)內(nèi);如果否,控制所述智能垃圾箱進(jìn)入待機(jī)模式;如果是,則控制所述智能垃圾箱移動(dòng)至所述用戶(hù)的扔投范圍內(nèi),并記錄所述智能垃圾箱的移動(dòng)軌跡;當(dāng)所述智能垃圾箱到達(dá)所述扔投范圍內(nèi)時(shí),控制所述智能垃圾箱的箱蓋打開(kāi);
9.s4、識(shí)別所述用戶(hù)的第三指令后,檢測(cè)所述智能垃圾箱是否裝滿(mǎn)垃圾;如果是,所述語(yǔ)音播報(bào)模塊發(fā)出提醒用戶(hù)及時(shí)傾倒垃圾的語(yǔ)音提示,并控制所述預(yù)警燈開(kāi)啟;如果否,則控制所述智能垃圾箱的箱蓋關(guān)閉,并根據(jù)所述移動(dòng)軌跡控制所述智能垃圾箱原路返回。
10.在一些優(yōu)選地實(shí)施例中,步驟s2中,獲取所述用戶(hù)的第二指令,并根據(jù)所述第二指令判斷所述用戶(hù)所在的扇區(qū)的具體方法如下:
11.s21、采集語(yǔ)音信號(hào);
12.s22、對(duì)所述語(yǔ)音信號(hào)進(jìn)行預(yù)處理,提取所述用戶(hù)的第二指令;
13.s23、獲取所述麥克風(fēng)陣列中三個(gè)麥克風(fēng)接收到所述第二指令聲波的時(shí)延差;根據(jù)所述時(shí)延差確定所述用戶(hù)相對(duì)于所述智能垃圾箱的平均方位角,并根據(jù)所述平均方位角確定所述用戶(hù)所在的扇區(qū)。
14.在一些優(yōu)選地實(shí)施例中,步驟s3中,
黨建宣傳欄,所述扔投范圍為所述智能垃圾箱距離所述用戶(hù)30
?
50厘米以?xún)?nèi)的范圍。
15.在一些更加優(yōu)選地實(shí)施例中,步驟s22中,所述預(yù)處理的具體方法如下:
16.t1、預(yù)加重處理:對(duì)所述語(yǔ)音信號(hào)中頻率為300
?
3400hz部分進(jìn)行加重;
17.t2、對(duì)步驟t1處理后的所述語(yǔ)音信號(hào)加漢明窗分幀處理;
18.t3、對(duì)步驟t2處理后的所述語(yǔ)音信號(hào)進(jìn)行端點(diǎn)檢測(cè),提取所述第二指令。
19.在一些更加優(yōu)選地實(shí)施例中,步驟s23中,獲取所述麥克風(fēng)陣列中三個(gè)麥克風(fēng)接收到所述第二指令聲波的時(shí)延差;根據(jù)所述時(shí)延差確定所述用戶(hù)相對(duì)于所述智能垃圾箱的平均方位角,并根據(jù)所述平均方位角確定所述用戶(hù)所在的扇區(qū)的具體方法如下:
20.p1、獲取三個(gè)所述麥克風(fēng)接收到所述第二指令聲波的時(shí)延差,并根據(jù)公式(1)、公式(2)和公式(3)分別計(jì)算所述用戶(hù)相對(duì)于三個(gè)所述麥克風(fēng)的方位角α、方位角β和方位角γ,并計(jì)算所述方位角α、方位角β和方位角γ的平均值,即為所述用戶(hù)相對(duì)于所述智能垃圾箱的平均方位角;
[0021][0022][0023][0024]
其中,將三個(gè)所述麥克風(fēng)分別記為麥克風(fēng)a、麥克風(fēng)b和麥克風(fēng)c;τ
ab
為所述麥克風(fēng)a和所述麥克風(fēng)b之間的時(shí)延差;τ
bc
為所述麥克風(fēng)b和所述麥克風(fēng)c之間的時(shí)延差;τ
ac
為所述麥克風(fēng)a和所述麥克風(fēng)c之間的時(shí)延差;|ab|為所述麥克風(fēng)a和所述麥克風(fēng)b之間的距離;|bc|為所述麥克風(fēng)b和所述麥克風(fēng)c之間的距離;|ac|為所述麥克風(fēng)a和所述麥克風(fēng)c之間的距離;v為聲速;
[0025]
p2、以三個(gè)所述麥克風(fēng)之間的連線(xiàn)組成的三角形的重心作為極點(diǎn),建立極坐標(biāo)系,并定義所述智能垃圾箱的正面為所述極坐標(biāo)系的零度;將所述極坐標(biāo)系均勻劃分成16個(gè)扇區(qū),根據(jù)所述平均方位角確定所述用戶(hù)所在的扇區(qū)。
[0026]
本發(fā)明還提出一種智能垃圾箱,包括垃圾箱本體、單片機(jī)和分別與所述單片機(jī)電性連接的語(yǔ)音識(shí)別模塊、麥克風(fēng)陣列模塊、紅外尋人模塊、超聲波測(cè)距模塊、滿(mǎn)載檢測(cè)模塊、語(yǔ)音播報(bào)模塊、預(yù)警燈、舵機(jī)開(kāi)蓋模塊和電機(jī)驅(qū)動(dòng)模塊;
[0027]
所述語(yǔ)音識(shí)別模塊設(shè)置在所述垃圾箱本體上,用于識(shí)別用戶(hù)的第一指令和第三指令,并用于根據(jù)所述第一指令將所述智能垃圾箱從待機(jī)狀態(tài)喚醒;
[0028]
所述麥克風(fēng)陣列模塊設(shè)置在所述垃圾箱本體的外側(cè),用于獲取所述用戶(hù)的第二指令;
[0029]
所述紅外尋人模塊設(shè)置在所述垃圾箱本體的外側(cè),用于判斷所述用戶(hù)是否在所述扇區(qū)內(nèi);
[0030]
所述超聲波測(cè)距模塊設(shè)置在所述垃圾箱本體的外側(cè),用于測(cè)量所述智能垃圾箱與所述用戶(hù)之間的距離;
[0031]
所述滿(mǎn)載檢測(cè)模塊設(shè)置在所述垃圾箱本體的內(nèi)部,用于檢測(cè)所述智能垃圾箱是否裝滿(mǎn)垃圾;
[0032]
所述語(yǔ)音播報(bào)模塊設(shè)置在所述垃圾箱本體上,用于播報(bào)語(yǔ)音提示;
[0033]
所述舵機(jī)開(kāi)蓋模塊設(shè)置在所述垃圾箱本體上,用于驅(qū)動(dòng)所述垃圾箱本體上的箱蓋打開(kāi)或者關(guān)閉;
[0034]
所述電機(jī)驅(qū)動(dòng)模塊設(shè)置在所述垃圾箱本體上,用于驅(qū)動(dòng)所述智能垃圾箱移動(dòng);
[0035]
所述單片機(jī)設(shè)置在所述垃圾箱本體上,用于根據(jù)所述第二指令判斷所述用戶(hù)所在
的扇區(qū);當(dāng)確認(rèn)所述用戶(hù)不在所述扇區(qū)時(shí),所述單片機(jī)用于控制所述智能垃圾箱進(jìn)入待機(jī)模式;當(dāng)確認(rèn)所述用戶(hù)在所述扇區(qū)時(shí),所述單片機(jī)用于控制所述智能垃圾箱移動(dòng)至所述用戶(hù)的扔投范圍內(nèi),并用于記錄所述智能垃圾箱的移動(dòng)軌跡;當(dāng)所述智能垃圾箱到達(dá)所述扔投范圍內(nèi)時(shí),所述單片機(jī)用于控制所述舵機(jī)開(kāi)蓋模塊驅(qū)動(dòng)所述智能垃圾箱的箱蓋打開(kāi);當(dāng)所述智能垃圾箱裝滿(mǎn)垃圾時(shí),所述單片機(jī)用于控制所述語(yǔ)音播報(bào)模塊發(fā)出提醒用戶(hù)及時(shí)傾倒垃圾的語(yǔ)音提示,并控制所述預(yù)警燈開(kāi)啟;當(dāng)所述智能垃圾箱未裝滿(mǎn)垃圾時(shí),所述單片機(jī)用于根據(jù)所述移動(dòng)軌跡控制所述智能垃圾箱原路返回。
[0036]
本發(fā)明的實(shí)施例提供的技術(shù)方案帶來(lái)的有益效果是:通過(guò)將本發(fā)明中的智能垃圾箱的控制方法用于所述智能垃圾箱的控制,當(dāng)用戶(hù)需要扔投垃圾時(shí),直接通過(guò)語(yǔ)音即可控制所述智能垃圾箱主動(dòng)移動(dòng)至所述用戶(hù)的扔投范圍內(nèi),使用方便;同時(shí),具備主動(dòng)開(kāi)蓋和滿(mǎn)載提醒的功能。
附圖說(shuō)明
[0037]
圖1為本發(fā)明某一實(shí)施例中智能垃圾箱的控制方法的
流程示意圖;
[0038]
圖2為本發(fā)明某一實(shí)施例中智能垃圾箱的立體結(jié)構(gòu)示意圖;
[0039]
圖3為圖2中智能垃圾箱的另一立體結(jié)構(gòu)示意圖;
[0040]
圖4為圖2中智能垃圾箱的底部結(jié)構(gòu)示意圖;
[0041]
圖5為圖2中智能垃圾箱的電路連接示意圖;
[0042]
圖6為圖2智能垃圾箱中麥克風(fēng)的空間分布及遠(yuǎn)場(chǎng)模型示意圖;
[0043]
其中,1、垃圾箱本體;101、箱蓋;102、滾輪;2、被動(dòng)紅外探測(cè)器;3、麥克風(fēng);4、語(yǔ)音識(shí)別模塊;5、超聲波測(cè)距模塊;6、語(yǔ)音播報(bào)模塊;7、紅外對(duì)射式光電開(kāi)關(guān)發(fā)射器;8、紅外對(duì)射式光電開(kāi)關(guān)接收器;9、舵機(jī)開(kāi)蓋模塊;10、單片機(jī);11、電機(jī)驅(qū)動(dòng)模塊。
具體實(shí)施方式
[0044]
下面結(jié)合附圖來(lái)具體描述本發(fā)明的優(yōu)選實(shí)施例,其中,附圖構(gòu)成本技術(shù)一部分,并與本發(fā)明的實(shí)施例一起用于闡釋本發(fā)明的原理,并非用于限定本發(fā)明的范圍。
[0045]
請(qǐng)參考圖2至圖5,本發(fā)明的實(shí)施例提供了一種智能垃圾箱,包括垃圾箱本體1、單片機(jī)10和分別與所述單片機(jī)10電性連接的語(yǔ)音識(shí)別模塊4、麥克風(fēng)陣列模塊、紅外尋人模塊、超聲波測(cè)距模塊5、滿(mǎn)載檢測(cè)模塊、語(yǔ)音播報(bào)模塊6、預(yù)警燈、舵機(jī)開(kāi)蓋模塊9和電機(jī)驅(qū)動(dòng)模塊11。
[0046]
語(yǔ)音識(shí)別模塊4設(shè)置在垃圾箱本體1上,用于識(shí)別用戶(hù)的第一指令和第三指令,并用于根據(jù)所述第一指令將所述智能垃圾箱從待機(jī)狀態(tài)喚醒;所述第一指令為用戶(hù)發(fā)出的聲音指令,示例性地,所述第一指令可以為“小智”;當(dāng)語(yǔ)音識(shí)別模塊4接收并識(shí)別出所述用戶(hù)發(fā)出的第一指令時(shí),所述智能垃圾箱從待機(jī)狀態(tài)被喚醒至工作狀態(tài);所述第三指令為用戶(hù)發(fā)出的聲音指令,示例性地,所述第三指令可以為“回去”;
[0047]
示例性地,在本實(shí)施例中,語(yǔ)音識(shí)別模塊4的型號(hào)為ld3320。
[0048]
所述麥克風(fēng)陣列模塊設(shè)置在垃圾箱本體1的外側(cè),用于獲取所述用戶(hù)的第二指令;所述麥克風(fēng)陣列包括三個(gè)均勻分布在垃圾箱本體1外側(cè)的麥克風(fēng)3;三個(gè)麥克風(fēng)3分別位于等邊三角形的三個(gè)頂點(diǎn)處;麥克風(fēng)3用于采集所述用戶(hù)的所述第二指令;所述第二指令為用
戶(hù)發(fā)出的聲音指令;所述麥克風(fēng)陣列與單片機(jī)10配合,能夠通過(guò)所述用戶(hù)第二指令確定所述用戶(hù)相對(duì)于所述智能垃圾箱的平均方位角。
[0049]
示例性地,在本實(shí)施例中,麥克風(fēng)3的型號(hào)為lm386。
[0050]
所述紅外尋人模塊設(shè)置在垃圾箱本體1的外側(cè),用于判斷所述用戶(hù)是否在所述扇區(qū)內(nèi);所述紅外尋人模塊包括八個(gè)均勻分布在垃圾箱本體1外側(cè)的被動(dòng)紅外探測(cè)器2;八個(gè)被動(dòng)紅外探測(cè)器2分布在同一圓周上。
[0051]
示例性地,在本實(shí)施例中,被動(dòng)紅外探測(cè)器2的型號(hào)為hc
?
sr501。
[0052]
超聲波測(cè)距模塊5設(shè)置在垃圾箱本體1的外側(cè),用于測(cè)量所述智能垃圾箱與所述用戶(hù)之間的距離。
[0053]
示例性地,在本實(shí)施例中,超聲波測(cè)距模塊5的型號(hào)為hc
?
sr04。
[0054]
所述滿(mǎn)載檢測(cè)模塊設(shè)置在垃圾箱本體1的內(nèi)部,用于檢測(cè)所述智能垃圾箱是否裝滿(mǎn)垃圾;所述滿(mǎn)載檢測(cè)模塊包括紅外對(duì)射式光電開(kāi)關(guān)發(fā)射器7和紅外對(duì)射式光電開(kāi)關(guān)接收器8;紅外對(duì)射式光電開(kāi)關(guān)發(fā)射器7和紅外對(duì)射式光電開(kāi)關(guān)接收器8相對(duì)設(shè)置在垃圾箱本體1的內(nèi)側(cè);當(dāng)垃圾箱本體1內(nèi)部的垃圾裝滿(mǎn)隔檔在紅外對(duì)射式光電開(kāi)關(guān)發(fā)射器7和紅外對(duì)射式光電開(kāi)關(guān)接收器8時(shí),紅外對(duì)射式光電開(kāi)關(guān)接收器8不能接收紅外對(duì)射式光電開(kāi)關(guān)發(fā)射器7發(fā)出的紅外信號(hào),從而判斷垃圾箱本體1內(nèi)裝滿(mǎn)了垃圾,并向單片機(jī)10發(fā)送滿(mǎn)載信號(hào);單片機(jī)10接收所述滿(mǎn)載信號(hào)后,控制語(yǔ)音播報(bào)模塊6發(fā)出語(yǔ)音提示:“請(qǐng)及時(shí)傾倒垃圾”,并控制所述預(yù)警燈開(kāi)啟,從而提醒用戶(hù)傾倒垃圾。
[0055]
語(yǔ)音播報(bào)模塊6設(shè)置在垃圾箱本體1上,用于播報(bào)語(yǔ)音提示;語(yǔ)音播報(bào)模塊6除了提示用戶(hù)及時(shí)傾倒垃圾外,還用于對(duì)用戶(hù)的所述第一指令、所述第二指令和所述第三指令進(jìn)行反饋;示例性地,對(duì)所述第一指令、所述第二指令和所述第三指令進(jìn)行反饋語(yǔ)音提示可以為“好的”。
[0056]
示例性地,在本實(shí)施例中,語(yǔ)音播報(bào)模塊6的型號(hào)為jq8400。
[0057]
舵機(jī)開(kāi)蓋模塊9設(shè)置在垃圾箱本體1上,
宣傳欄,用于驅(qū)動(dòng)垃圾箱本體1上的箱蓋101打開(kāi)或者關(guān)閉。
[0058]
示例性地,在本實(shí)施例中,舵機(jī)開(kāi)蓋模塊9的型號(hào)為sg90。
[0059]
電機(jī)驅(qū)動(dòng)模塊11設(shè)置在垃圾箱本體1上,用于驅(qū)動(dòng)所述智能垃圾箱移動(dòng);電機(jī)驅(qū)動(dòng)模塊11設(shè)置在垃圾箱本體1的底部;電機(jī)驅(qū)動(dòng)模塊11與垃圾箱本體1底部的滾輪102傳動(dòng)連接,用于驅(qū)動(dòng)滾輪102轉(zhuǎn)向或者轉(zhuǎn)動(dòng);電機(jī)驅(qū)動(dòng)模塊11能夠驅(qū)動(dòng)所述智能垃圾箱完成轉(zhuǎn)向、直行、后退等操作。
[0060]
示例性地,在本實(shí)施例中,電機(jī)驅(qū)動(dòng)模塊11的型號(hào)為l298n。
[0061]
單片機(jī)10設(shè)置在垃圾箱本體1上,用于根據(jù)所述第二指令判斷所述用戶(hù)所在的扇區(qū);當(dāng)確認(rèn)所述用戶(hù)不在所述扇區(qū)時(shí),單片機(jī)10用于控制所述智能垃圾箱進(jìn)入待機(jī)模式;當(dāng)確認(rèn)所述用戶(hù)在所述扇區(qū)時(shí),單片機(jī)10用于控制所述智能垃圾箱移動(dòng)至所述用戶(hù)的扔投范圍內(nèi),
滾動(dòng)廣告燈箱,并用于記錄所述智能垃圾箱的移動(dòng)軌跡;當(dāng)所述智能垃圾箱到達(dá)所述扔投范圍內(nèi)時(shí),單片機(jī)10用于控制舵機(jī)開(kāi)蓋模塊9驅(qū)動(dòng)智能垃圾箱的箱蓋101打開(kāi);當(dāng)所述智能垃圾箱裝滿(mǎn)垃圾時(shí),單片機(jī)10用于控制語(yǔ)音播報(bào)模塊6發(fā)出提醒用戶(hù)及時(shí)傾倒垃圾的語(yǔ)音提示,并控制所述預(yù)警燈開(kāi)啟;當(dāng)所述智能垃圾箱未裝滿(mǎn)垃圾時(shí),單片機(jī)10用于根據(jù)所述移動(dòng)軌跡控制所述智能垃圾箱原路返回。
[0062]
示例性地,在本實(shí)施例中,單片機(jī)10的型號(hào)為stm32。
[0063]
參考圖1,本實(shí)施例中的智能垃圾箱的控制方法包括如下步驟:。
[0064]
s1、通過(guò)語(yǔ)音識(shí)別模塊4,識(shí)別用戶(hù)的第一指令,并根據(jù)所述第一指令將所述智能垃圾箱從待機(jī)狀態(tài)喚醒;當(dāng)所述用戶(hù)需要扔投垃圾時(shí),發(fā)出第一指令“小智”;語(yǔ)音識(shí)別模塊4識(shí)別所述用戶(hù)發(fā)出的所述第一指令后,控制所述智能垃圾箱進(jìn)入工作狀態(tài)。
[0065]
s2、獲取所述用戶(hù)的第二指令,并根據(jù)所述第二指令判斷所述用戶(hù)所在的扇區(qū);當(dāng)所述智能垃圾箱進(jìn)入工作狀態(tài)后,所述用戶(hù)需要發(fā)出所述第二指令;所述麥克風(fēng)陣列模塊采集到所述第二指令后,與單片機(jī)10配合,判斷所述用戶(hù)所在的扇區(qū)。
[0066]
s3、所述紅外尋人模塊判斷所述用戶(hù)是否在所述扇區(qū)內(nèi);如果否,通過(guò)單片機(jī)10控制所述智能垃圾箱進(jìn)入待機(jī)模式;如果是,則通過(guò)單片機(jī)10控制所述智能垃圾箱移動(dòng)至所述用戶(hù)的扔投范圍內(nèi),并記錄所述智能垃圾箱的移動(dòng)軌跡;當(dāng)所述智能垃圾箱到達(dá)所述扔投范圍內(nèi)時(shí),通過(guò)單片機(jī)10控制電機(jī)驅(qū)動(dòng)模塊11驅(qū)動(dòng)所述智能垃圾箱的箱蓋101打開(kāi)。
[0067]
為了方便用戶(hù)將垃圾扔投至垃圾箱本體1內(nèi),所述扔投范圍為所述智能垃圾箱距離所述用戶(hù)30
?
50厘米以?xún)?nèi)的范圍;具體地,在本實(shí)施例中,所述扔投范圍為40厘米;當(dāng)所述智能垃圾箱移動(dòng)至距離所述用戶(hù)40厘米時(shí),停止移動(dòng)。
[0068]
s4、語(yǔ)音識(shí)別模塊4識(shí)別所述用戶(hù)的第三指令后,首先通過(guò)所述滿(mǎn)載檢測(cè)模塊檢測(cè)所述智能垃圾箱是否裝滿(mǎn)垃圾;如果是,語(yǔ)音播報(bào)模塊6發(fā)出提醒用戶(hù)及時(shí)傾倒垃圾的語(yǔ)音提示,并控制所述預(yù)警燈開(kāi)啟;如果否,則控制所述智能垃圾箱的箱蓋101關(guān)閉,并根據(jù)所述移動(dòng)軌跡控制所述智能垃圾箱原路返回。
[0069]
示例性地,在本實(shí)施例中,所述第三指令可以為“回去”。
[0070]
所述智能垃圾箱的原路返回功能主要基于單片機(jī)10對(duì)尋找所述用戶(hù)過(guò)程的記錄,單片機(jī)10將尋找所述用戶(hù)過(guò)程中的各段數(shù)據(jù)儲(chǔ)存到單片機(jī)10的rom中并將其逆回去,從而實(shí)現(xiàn)原路返回功能,在硬件上無(wú)需添加新的模塊。
[0071]
具體地,步驟s2中,
候車(chē)亭,獲取所述用戶(hù)的第二指令,并根據(jù)所述第二指令判斷所述用戶(hù)所在的扇區(qū)的具體方法如下:
[0072]
s21、采集語(yǔ)音信號(hào);
[0073]
s22、對(duì)所述語(yǔ)音信號(hào)進(jìn)行預(yù)處理,提取所述用戶(hù)的第二指令;
[0074]
具體地,所述預(yù)處理的具體方法如下:
[0075]
t1、預(yù)加重處理:對(duì)所述語(yǔ)音信號(hào)中頻率為300
?
3400hz部分進(jìn)行加重;
[0076]
t2、對(duì)步驟t1處理后的所述語(yǔ)音信號(hào)加漢明窗分幀處理;
[0077]
t3、對(duì)步驟t2處理后的所述語(yǔ)音信號(hào)進(jìn)行端點(diǎn)檢測(cè),提取所述第二指令。
[0078]
s23、獲取所述麥克風(fēng)陣列中三個(gè)麥克風(fēng)3接收到所述第二指令聲波的時(shí)延差;根據(jù)所述時(shí)延差確定所述用戶(hù)相對(duì)于所述智能垃圾箱的平均方位角,并根據(jù)所述平均方位角確定所述用戶(hù)所在的扇區(qū)。
[0079]
具體地,參考圖6,確定所述用戶(hù)所在的扇區(qū)的具體方法如下:
[0080]
p1、獲取三個(gè)麥克風(fēng)3接收到所述第二指令聲波的時(shí)延差,并根據(jù)公式(1)、公式(2)和公式(3)分別計(jì)算所述用戶(hù)相對(duì)于三個(gè)麥克風(fēng)3的方位角α、方位角β和方位角γ,
戶(hù)外滾動(dòng)燈箱,并計(jì)算所述方位角α、方位角β和方位角γ的平均值,即為所述用戶(hù)相對(duì)于所述智能垃圾箱的平均方位角;
[0081][0082][0083][0084]
其中,將三個(gè)麥克風(fēng)3分別記為麥克風(fēng)a、麥克風(fēng)b和麥克風(fēng)c;τ
ab
為所述麥克風(fēng)a和所述麥克風(fēng)b之間的時(shí)延差;τ
bc
為所述麥克風(fēng)b和所述麥克風(fēng)c之間的時(shí)延差;τ
ac
為所述麥克風(fēng)a和所述麥克風(fēng)c之間的時(shí)延差;|ab|為所述麥克風(fēng)a和所述麥克風(fēng)b之間的距離;|bc|為所述麥克風(fēng)b和所述麥克風(fēng)c之間的距離;|ac|為所述麥克風(fēng)a和所述麥克風(fēng)c之間的距離;v為聲速;
[0085]
p2、以三個(gè)麥克風(fēng)3之間的連線(xiàn)組成的三角形的重心作為極點(diǎn),建立極坐標(biāo)系,并定義所述智能垃圾箱的正面為所述極坐標(biāo)系的零度;將所述極坐標(biāo)系均勻劃分成16個(gè)扇區(qū),根據(jù)所述平均方位角確定所述用戶(hù)所在的扇區(qū)。
[0086]
在本實(shí)施例中,假設(shè)聲速波長(zhǎng)為λ,麥克風(fēng)3之間的距離為d,聲源與麥克風(fēng)3之間的距離為r,若則符合遠(yuǎn)場(chǎng)模型,即視聲源信號(hào)近似為平面波,反之為近場(chǎng)模型,視聲源信號(hào)近似為球面波。因?yàn)橥ǔG闆r下,用戶(hù)發(fā)出的語(yǔ)音信號(hào)的頻率范圍為300
?
3400hz;
[0087]
示例性地,本實(shí)施例中三個(gè)麥克風(fēng)3之間的距離為12cm,故采用遠(yuǎn)場(chǎng)模型。
[0088]
在本文中,所涉及的前、后、上、下等方位詞是以附圖中零部件位于圖中以及零部件相互之間的位置來(lái)定義的,只是為了表達(dá)技術(shù)方案的清楚及方便。應(yīng)當(dāng)理解,所述方位詞的使用不應(yīng)限制本技術(shù)請(qǐng)求保護(hù)的范圍。
[0089]
在不沖突的情況下,本文中上述實(shí)施例及實(shí)施例中的特征可以相互結(jié)合。
[0090]
以上所述僅為本發(fā)明的較佳實(shí)施例,并不用以限制本發(fā)明,凡在本發(fā)明的精神和原則之內(nèi),所作的任何修改、等同替換、改進(jìn)等,均應(yīng)包含在本發(fā)明的保護(hù)范圍之內(nèi)。


